Seeing Space
Project
The project's tiltle is Visualizing Real-Time Data and Performance Metrics in KUKA Robot Experimentation.
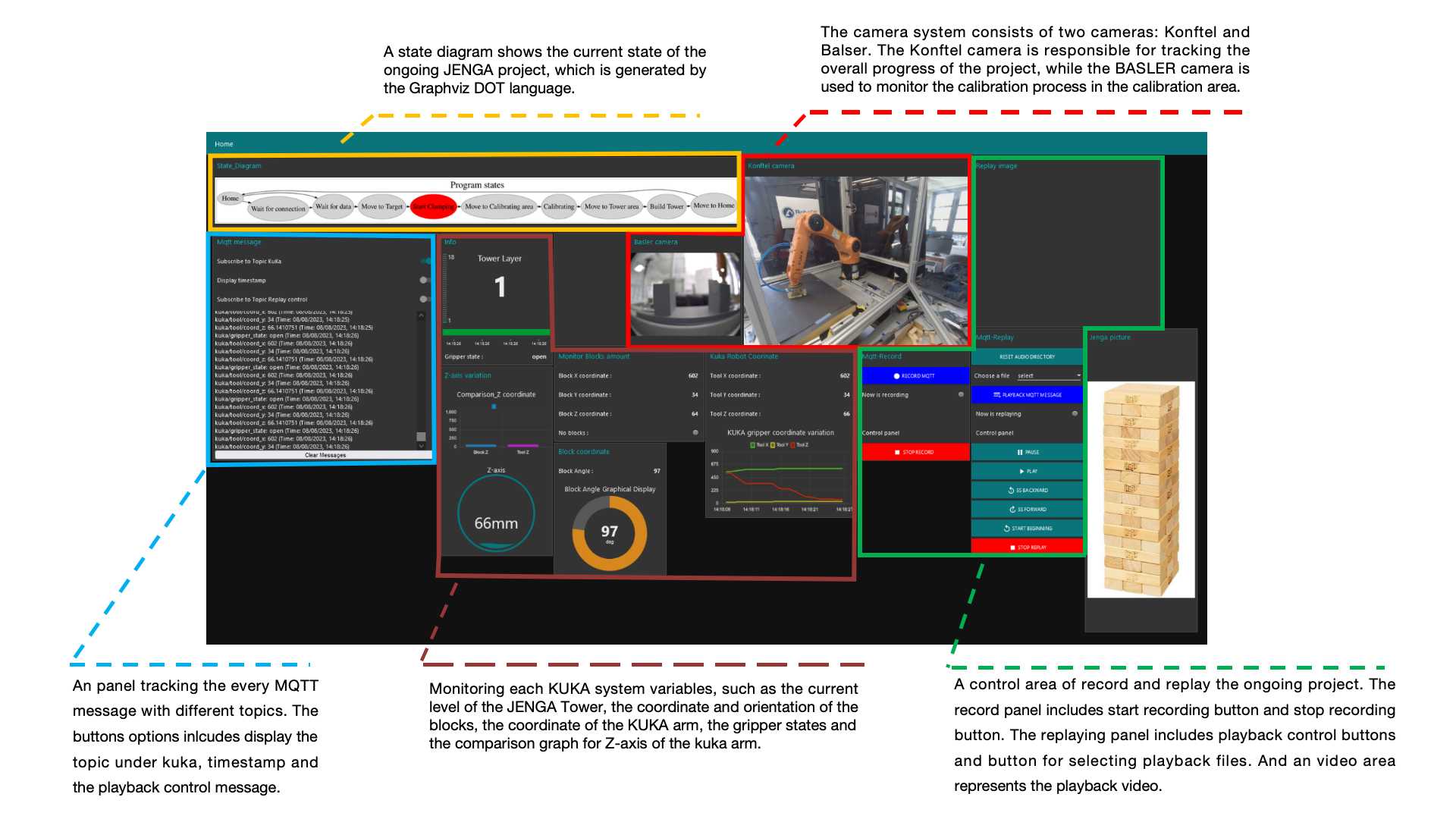
This project, inspired by the talks from Bret Victor, presents a prototype of the SeeingSpace, focusing on achieving the Seeing inside and Seeing across time concepts. The prototype comprises an observed robotic project and a user interface. The observed robotic project used in this prototype is the JENGA project, where a KUKA robotic arm and a Cognex camera are employed to build a JENGA tower. The user interface utilizes the Node-RED dashboard serving as the interface for visualizing the changing data from the developing project. The Message Queuing Telemetry Transport (MQTT) publish-subscribe pattern is utilized as the main communication approach between the JENGA project and the Node-RED dashboard.
The project is guided by six main topics that direct its development process. These topics cover areas such as the utilization of the JENGA project, MQTT communication structure, Node-RED dashboard visualization, camera system, and video playback.
Project Environment
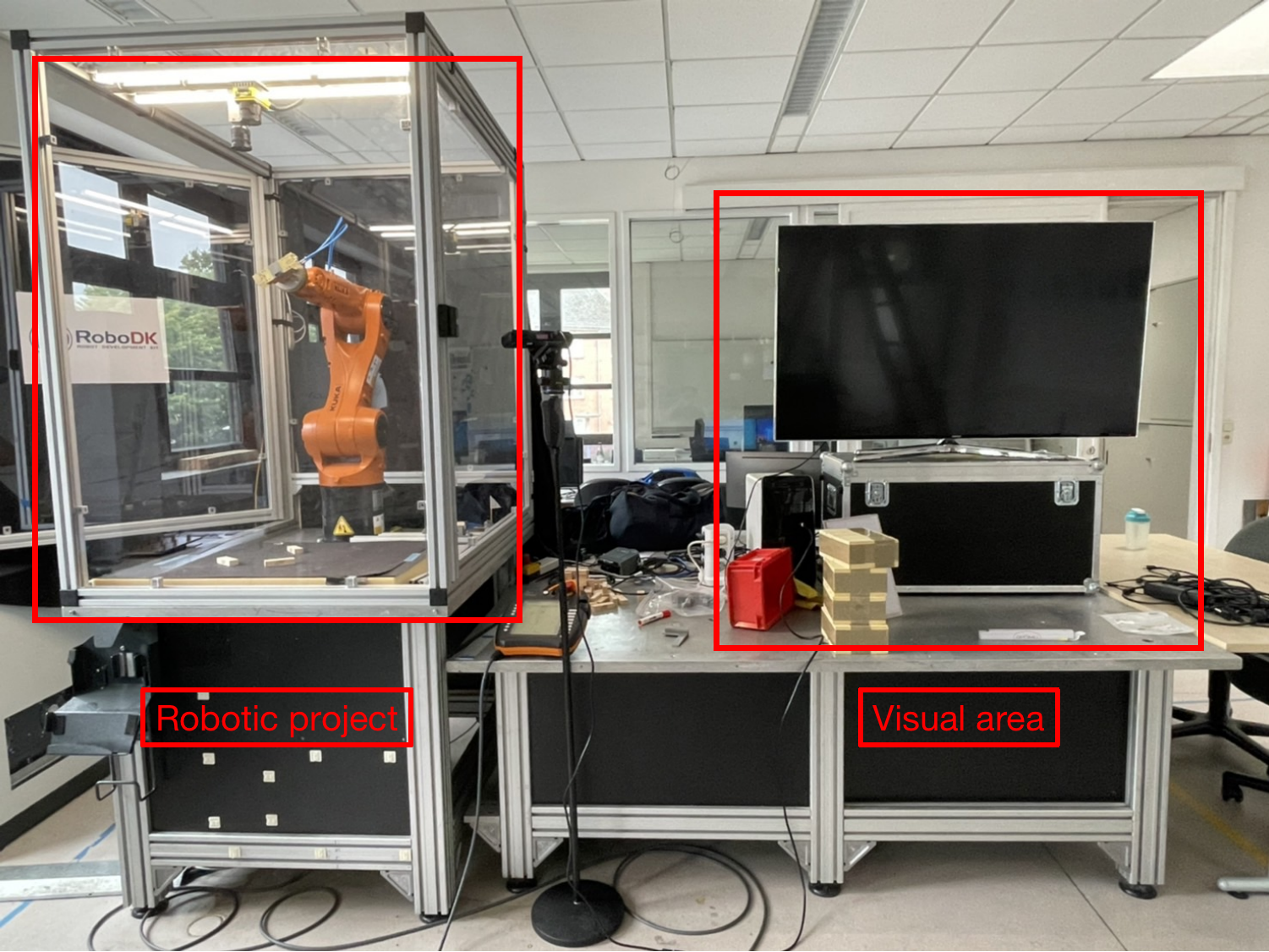
The experimental environment
Libraries & Tools
- External project: JNEGA Project
- MQTT libraries: Mosquitto MQTT, Paho-MQTT, MQTT-Record-Replay
- Programming tools: Node-RED , PyOpenShowVar
- Cameras: KonftelCam20, Basler dart daA1820-54uc
- Programming Languages: Graphviz Dot, Python, Javascript, Golang, KUKA KRL
Six Stages
The project is guided by six main topics that direct its development process. These topics cover areas such as the utilization of the JENGA project, MQTT communication structure, Node-RED dashboard visualization, camera system, and video playback.
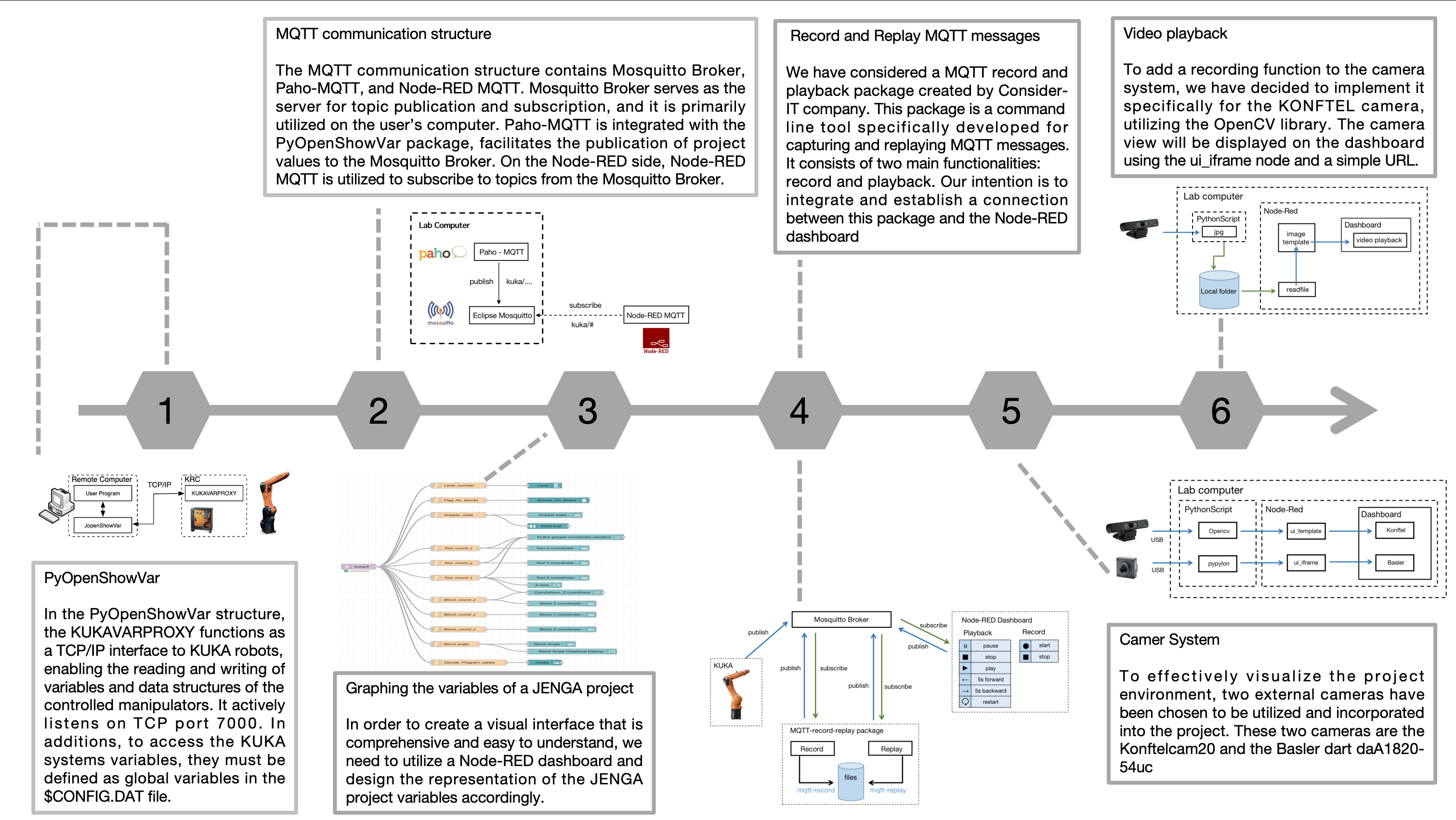
Six-stages diagram
Project Results